手こぎ作業時の巻き込まれによる重傷事故を低減
- フィードチェーンを即時停止、挟まれた手を直ちに解放
- 手こぎモードで余裕を持って安心作業
(2013年発表)
手こぎ作業時の巻き込まれによる重傷事故を低減
本開発装置を搭載したコンバインならば、手こぎ作業中に万が一手が挟まれた場合でも、緊急停止ボタンを押すことで、フィードチェーンが従来よりも速く停止し、さらに、挟まれた手が直ちに解放される、あるいは、手が巻き込まれる危険性を回避できるなど、事故そのものの発生もしくは重傷事故の低減に寄与。
2014年度以降、対応可能な新機種から順次、標準装備される予定である。
手こぎ作業時は、袖口をしっかり締め、手袋は装着しないことが望ましい。
井関農機株式会社、株式会社クボタ、三菱農機株式会社、ヤンマー株式会社
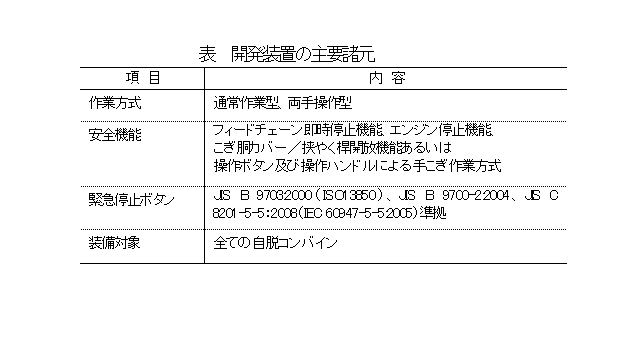
本装置は、従来通りに手こぎ作業を行う通常作業型(図1、2)と、手が巻き込まれる危険性がない両手操作型(図3)がある。いずれも、手こぎ作業時はフィードチェーン搬送速度が遅くなる手こぎモードに切り替わる。また、緊急停止ボタンは、断線等の故障時にエンジンが始動できないNC(ノーマルクローズ)接点であり、動作後にその場で解除操作しないとエンジンが再起動できない自己保持型を装備している。
通常作業型は、緊急停止ボタンの操作により、エンジンを停止するとともに、フィードチェーンへの動力伝達を遮断し、即時停止するとともに、こぎ胴カバーあるいは挟やく桿を開放する。
両手操作型は、フィードチェーンの機体前方方向に配置した手こぎ操作ハンドルと、手こぎ作業位置左手側に配置した操作ボタンの両方を操作しないと、フィードチェーンが駆動しない。手こぎ作業は、手こぎ部のフィードチェーン上にイネを置き、右手で手こぎ操作ハンドルを降ろしてイネを押さえるとともに、左手で操作ボタンを押して行う。左右どちらかの手を離すとフィードチェーンは即時停止する。

(試験場所:埼玉県さいたま市)