
成果の概要
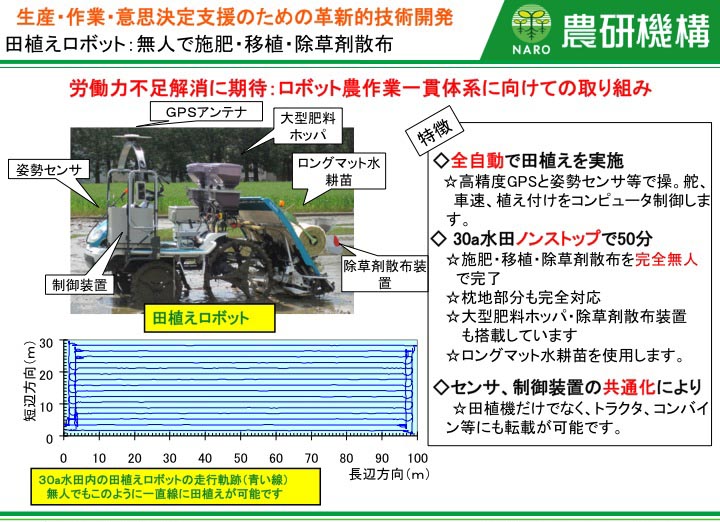
水稲作の耕うんから収穫まで、すべてのほ場作業をロボット化する無人機械作業体系を開発しています。無人機械作業体系を低コストに、効率よく開発するため、GPS等のセンサやコンピュータを、トラクタ、田植機、管理機、コンバインの各ロボット間で共用できるようにしていきます。
担当
高度作業システム研究チーム
マニュアル等
- An Autonomous Rice Transplanter Guided by Global Positioning System and Inertial Measurement Unit(PDF)
研究成果情報
研究紹介
- ロボット農作業
- 「今年のロボット」大賞2008アーカイブ
- 30アール水田でノンストップ無人田植え作業を実現(PDF)