自律走行型農作業ロボットへのCANバス利用
※アーカイブの成果情報は、発表されてから年数が経っており、情報が古くなっております。
同一分野の研究については、なるべく新しい情報を検索ください。
要約
情報機器の着脱が容易でシステムの拡張性が高いCANバスを介して、高精度GPSと姿勢センサ等のセンサ、アクチュエータ、コンピュータを接続することにより、操舵、車速、作業機等を分散制御して自律走行作業が可能な農作業ロボットを構築できる。
- キーワード:GPS、CAN、ロボット、分散制御
- 担当:中央農研・高度作業システム研究チーム
- 代表連絡先:電話029-838-8815
- 区分:共通基盤・作業技術、関東東海北陸・作業技術
- 分類:研究・普及
背景・ねらい
農業労働力の高齢化と減少に伴い、担い手の規模拡大が進んでいる。しかし、一筆の圃場区画が大型化するのではなく、分散した圃場の数が増えることによる規模拡大であり、農業機械の大型化では対応しきれない。圃場が分散した状態でも大規模経営が可能な作業技術が必要である。このために、一人の作業者が複数のロボットを管理して、労働生産性を向上させるロボット農作業システムが有効と考えられるが、自律走行型の農作業ロボットは高価なGPS、姿勢センサ並びに制御装置を用いているため実用化に向けてはコストの低減が課題である。このため、センサ、制御装置を異なるロボット間で載せ替え共通に利用できるようにCAN(Controller Area Network)バスを導入した農作業ロボットを開発する。
成果の内容・特徴
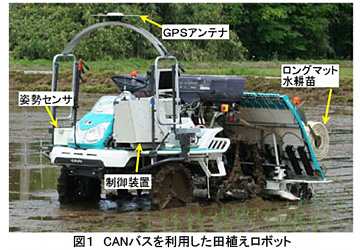
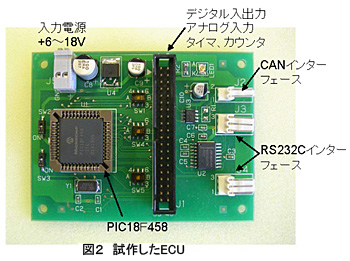
- 農作業ロボットの例として挙げる田植えロボット(図1)は、市販6条植え乗用田植機(K社SPU650)をベースとして、CANバスにRTKGPS、姿勢センサ、メインコンピュータ、操舵部、変速(HST)部、作業機等が、それぞれECU(Electronic Control Unit : I/Oコントローラ、図2)を介して接続されている。(1)VRS(仮想基準点)方式のネットワーク型RTKGPSによる位置計測、(2)姿勢センサによる機体傾斜と進行方向検出、(3)設定経路からの各部制御量の計算、(4)操舵制御、(5)HST制御、(6)作業機の昇降と植え付けのon/off制御、など各ノードは分散制御される(図3)。
- CANバスを利用した田植えロボットでは、直線植え付け作業と枕地旋回を組み合わせることで、支障なく無人田植え作業を完了できる(図4)。
- GPS、姿勢センサ並びに制御装置と田植機の操作部分はCANバスを介して接続されているため、耕うん、収穫など他の農作業ロボットと統一した通信プロトコルを用いることにより、高価なGPS等のセンサ並びにコンピュータ等(図3破線内)を共用しうるとともに、CANバスを利用することで非常停止、障害物対策等、新たな機能を容易に追加できる。
- 例に示した田植えロボットでのCANバスのメッセージフォーマットは、一部定義されていない部分を除き、農業機械の通信システムの標準規格であるISO11783に準拠してID、信号内容を設定してあり、この規模のシステム(CANバス通信速度250kbps、ECU6個、データ更新10Hz)での制御ではCANバス負荷は8%であり十分低く余裕がある。
成果の活用面・留意点
- CANバスを利用し、統一した通信プロトコルを用いることで、センサ、制御装置等を共用でき農作業ロボットの機材費の低減が可能である。
- 希望者には試作したPIC仕様のECUに関する情報を提供できる。
具体的データ
その他
- 研究課題名:農作業の高精度化・自動化等による高度生産システムの開発及び労働の質改善のための評価指標の策定
- 課題ID:223-a
- 予算区分:基盤、交付金プロ(農作業ロボット)
- 研究期間:2006~2008
- 研究担当者:長坂善禎、玉城勝彦、小林恭、齋藤秀文、齋藤正博、建石邦夫、屋代幹雄
- 発表論文等:1)長坂ら(2008)、農業機械学会誌、70(1):79-84
2)Nagasaka Y. et al. (2007),CIGR E-journal 9