ポイント
- 直進と旋回の大幅な速度アップを可能とする自動操舵システムを開発
- 無人運転で熟練者以上の速度と精度で植え付け
- 田植え作業と苗補給を1人で実現可能
- 自走車両全般の自動運転への活用に期待
概要
農研機構では、田植え作業における省力化や人手不足解消に向けて、無人作業が可能な自動運転田植機を開発しています。この開発研究は、「SIP(次世代農林水産業創造技術)委託研究」(農研機構)の一環として実施しており、この度、開発が一定の水準まで達しましたので、実演会を開催して関係各位との意見交換の場を持つことといたしました。
開発機は、自ら判断した走行経路に沿って無人で往復行程の田植えができます。従来はオペレータと苗補給者の2人が必要でしたが、1人で簡単に高精度な田植えを実現します。速度は、すでに開発された田植えロボット※1の2倍を達成し、実用化に大きく近づきました。なお、この技術は、田植機に限らず自走車両全般の自動運転技術として活用が期待されます。
関連情報
| 予算 | : | 内閣府戦略的イノベーション創造プログラム(SIP)「次世代農林水産業創造技術」 及び運営費交付金 |
| 特許 | : | 特許出願済 |
詳細情報
背景と経緯
日本の水稲作は、トラクタ、コンバイン、田植機に代表される農業機械の普及により、高速化と大幅な省力化が実現されました。一方、1経営体当たりの作付面積は増加の一途をたどり、なかでも10haを超える大規模経営がその過半数を担うようになっており、更なる高能率化、省力化が求められています。
そこで農研機構では、田植え作業で欠かすことのできない苗や薬剤の補給を行う補助作業者に注目し、田植機の運転操作を自動化することで、田植えと資材補給、監視を作業者1名で実現する、新しい田植え作業システムを開発してきました。
内容
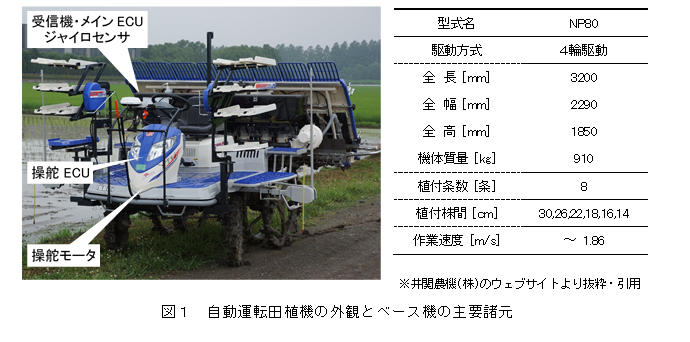
- 市販の乗用田植機(8条)をベースとし、機体前方にRTK-GNSS※2のアンテナと受信機を備え、自機の位置を数cmの測位精度で把握します。また、三軸ジャイロセンサ※3を併設することで、自機の向き、傾きを計測して、より高精度な位置情報に補正します(図1)。
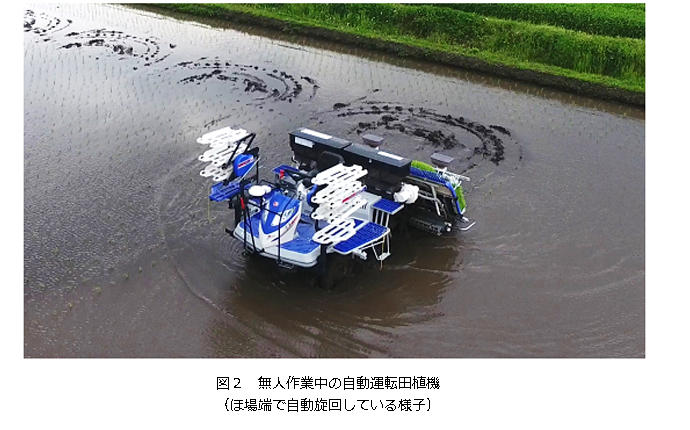
- 衛星測位情報などから求めた自機の位置を基に、ハンドルと操舵機構の中継部に組み込んだ操舵モータをECU※4で制御し、予め作成した経路に沿って走行するように自動で操舵を行います。特に旋回時は、独自開発の自動操舵システムにより、次の直進行程の開始位置に円滑かつ迅速に合わせることができます(図2)。
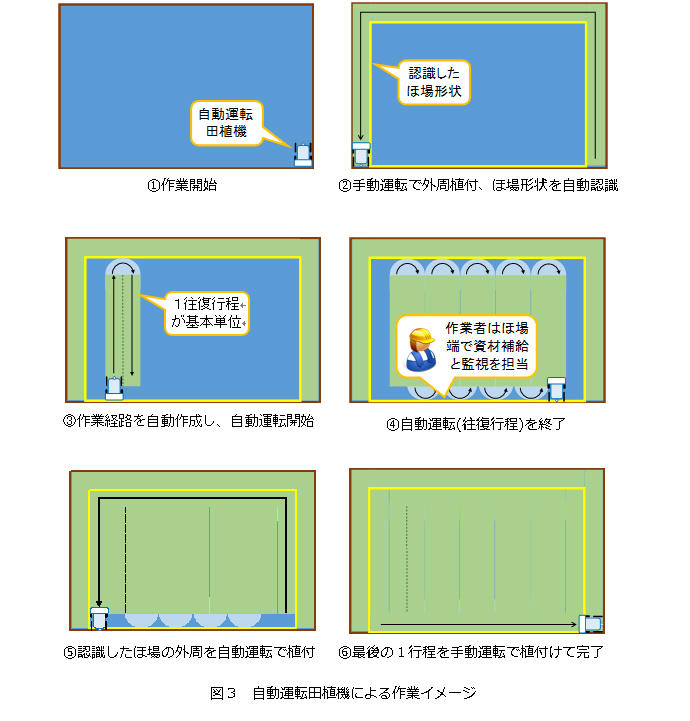
- 最初にほ場最外周の3辺を有人運転で植え付けることでほ場の形状を認識し、走行経路を自動で作成します(図3)。正方形や長方形になっていない不整形なほ場でも走行経路の作成が可能です。
- 独自開発の自動操舵システムにより、田植機の最高速度(ベース機では1.86m/s)で植付作業を行っても熟練者並みの直進精度が誰でも得られます。さらに、人間とは違い疲れを知らないため、高い作業精度を維持しながら能率向上が期待できます。
- 携帯式ペンダントリモコン(図4)により、緊急停止、機械の畔寄せなどの遠隔操作が可能です。また、田植機には一定時間リモコンとの通信が途絶えた場合や衛星測位情報が受信できなくなった場合には、作業を中止する安全機能が組み込まれています。
今後の予定・期待
開発機は、田植え作業における大幅な省力化と安全性の確保を両立できる、新しい作業技術として早期の実用化が期待できます。
なお、平成29年7月6日に現地実演会を開催し、皆様との意見交換の場を持つことといたしました。詳しくは、別紙の開催要領をご覧下さい。
また、これまでに公表済みの正条植え※5が可能な電動植付田植機についても併せて展示を行う予定としております。
※自動運転田植機実演会は終了いたしました。
用語の解説
※1 田植えロボット:
詳細は農研機構中央農業研究センターの2008年度研究成果情報「自律走行型農作業ロボットへのCANバス利用」(http://www.naro.affrc.go.jp/project/results/laboratory/narc/2008/narc08-06.html)を参照願います。
※2 RTK-GNSS:
衛星測位システム(GNSS:Global Navigation Satellite System)の一形態で、カーナビなどで広く使われているD-GPS(数mの誤差)という方法と比べ、高精度(数cmの誤差)な位置決めができます。無人走行には不可欠な技術です。
※3 三軸ジャイロセンサ:
縦、横、高さの三次元方向の傾き(軸回りの単位時間あたりの回転角)を計測するセンサで、カメラの手振れ防止機能やドローンの飛行姿勢制御などに広く使われています。
※4 ECU:
電子制御ユニット(Electric Control Unit)。センサ等の信号を取り込み、予めプログラムされた手順に従ってモータ等の装置を制御します。
※5 正条植え:
条間及び株間を30cmに揃え、かつ株間方向(条方向)だけではなく、条間方向にも苗が揃うように植える方法です。苗が碁盤の目状に整列するため、機械除草機を直交掛けにすることが可能となります。