| 走行予測表示機能のある圃場作業用GPSトラクタガイダンスシステム |
|
| [要約] |
トラクタガイダンスシステムは、搭載したパソコンからメニュー方式によって圃場での効率的な目標作業経路を自動生成し、GPSやジャイロを利用して一定時間後のトラクタの位置、目標ラインからの変位、方向を予測表示でき、安定して精度の高いトラクタ作業を支援する。枕地における旋回ラインも自動で表示する。 |
| [キーワード] |
走行予測、GPS、ガイダンス、フィルタリング、ナビゲーション、トラクタ |
|
|
| [背景・ねらい] |
大規模な圃場では目標が少なく、トラクタを作業幅に応じて等間隔に直進走行させることは熟練した作業者でも難しい。従来のガイダンスシステムでは、GPSの変動誤差や運転操作の時間遅れによる蛇行運転への対策が十分ではない。そこで、衛星の補正情報を受信できるディファレンシャルGPSと3軸ジャイロを組み込み、フィルタリング処理と予測により、一定時間後の作業機の位置と方向を高精度にディスプレイに表示して、長時間作業でも安定したトラクタの高精度な運転操作を支援する走行予測表示機能のあるガイダンスシステムを開発する。 |
| [成果の内容・特徴] |
- システムは、衛星(MSAS)の補正情報を受信できるディファレンシャルGPS受信機(Thales社、DG14)、GPSアンテナ、ノートパソコン、3軸ジャイロ(Micro
strain社、3DM-GX1)からなる。
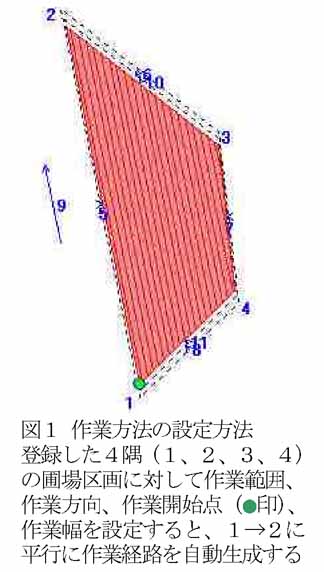
- トラクタに搭載したパソコン画面上で圃場の4隅(図1の1から4)の座標を登録し、圃場内の作業範囲、旋回スペース、作業幅、作業方法(往復、中割り、回り走行や作業方向)などを設定すると、目標作業経路を自動生成して表示する。また、作業内容、走行経路を自動記録し、帳票を自動作成し出力する。
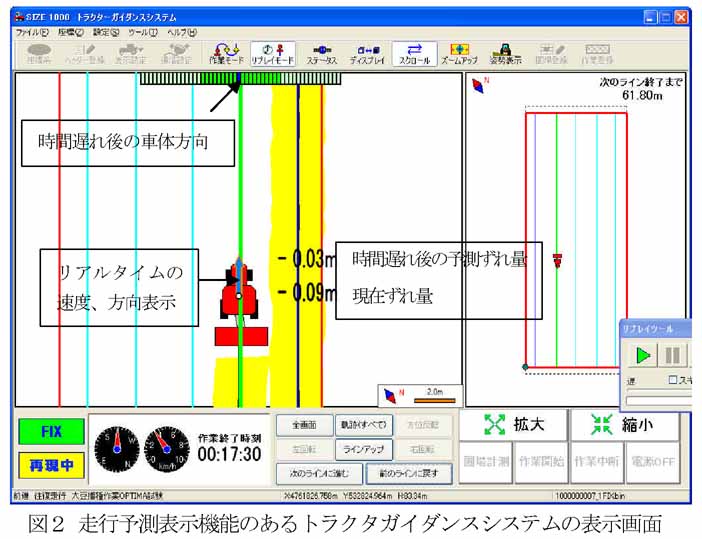
- リアルタイムの位置、速度、方向の表示に加えて、運転操作の時間遅れを考慮して、一定時間(0.5〜3秒の範囲で設定)後の車両位置、目標ラインからの変位、方向を計算して走行を予測し、走行状況を視覚的に表示する。これによって早めに走行方向のずれを修正することができ、蛇行を防ぐことができる(図2)。
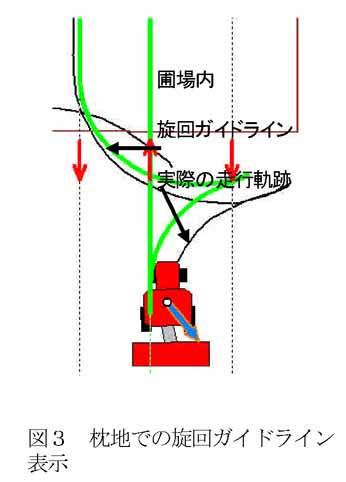
- 枕地における旋回ガイドラインが表示され、これに沿って進入位置を調整しながら次の行程に最短でスムーズに入ることができる(図3)。
- ディファレンシャルGPS受信機と3軸ジャイロを組み合わせてフィルタリング処理し、GPSの変動誤差に対しても位置、方向、速度の安定化と精度向上を図っている。習熟者がトラクタで往復走行を行う場合、目標作業経路からのずれ(運転精度)は±20cm以内である。これにより任意の幅の等間隔作業ができる(図4)。
|
| [成果の活用面・留意点] |
- 1行程距離の長いトラクタ作業や傾斜地、マーカの使用できない圃場でも高精度な等間隔往復直進作業や中割作業が可能で、追肥や牧草転草作業に有効である。変形圃場での曲線作業には適応していない。
- 作業スタート地点で位置合わせを行ってGPSのオフセット誤差を補正できる。表示位置誤差は±40cm以内である。走行速度は、10km/hまで対応できる。
- システムの使い方に半日程度の習熟を要する。モニタ装置は、作業時の視野の範囲内に設置する。
- 特許出願の上、2007年にジオサーフ社より発売の予定である。
|
| [具体的データ] |

|
|
| [その他] |
| 研究課題名 |
: |
北海道地域における高生産性水田輪作システムの確立 |
| 課題ID |
: |
211-k |
| 予算区分 |
: |
基盤、顕在化ステージ |
| 研究期間 |
: |
2006〜2007年度 |
| 研究担当者 |
: |
井上慶一、新居和展(ジオサーフ社)、張 雲(ジオサーフ社)、大下泰生 |
| 発表論文等 |
: |
| |