露地切り花用に開発した農薬被曝低減対策防除機
- [要約]
- 作業者の農薬被曝低減と能率向上を目的に開発した防除機は、リモコン式の無人走行可能防除機であり、多畦(2畦・3畦)同時防除により、慣行(動噴)作業の4〜5倍の能率向上が図られ、作業者の軽作業化と安全性が確保される。
- [キーワード]
- 防除機、露地切り花、農薬被曝低減、多畦(2畦・3畦)同時防除、無人防除
- [担当]
- 鹿児島県農業試験場・大隅支場・農機研究室
[連絡先]0994-62-2001
[区分]九州沖縄農業・農業機械・土木
[分類]技術・普及
-
[背景・ねらい]
-
鹿児島県はかごしまブランド産地育成をめざして花きの生産拡大を進め、キク、ユリ、グラジオラスを重点品目として位置づけ、振興を図っている。その中で小ギクは労働集約型の作目で、特に防除作業は他作物に比べ回数が極めて多く、作業者の健康への影響が懸念されている。そこで、主な対象品目を小ギクとして露地切り花用防除機の開発改良を行い、省力軽作業化技術の確立並びに労働環境改善を図る。
-
[成果の内容・特徴]
-
-
開発機は、畦間走行用自走式クローラスプレーヤで、平面・立体散布兼用の防除機である。機体寸法は、全長170cm、全幅45cm、クローラ外幅39cm、全高194cmで、機関出力2.9kw(4.0ps)、ポンプ吸水量23L/min、薬液タンク容量200Lを搭載している。
- 立体散布時の能率向上対策として、縦・水平ブームを2〜3畦同時防除用に改良し、また、散布精度向上対策として、畦間用縦ブームに24口、平面ブームに6口の計30口の角度調節機能付きのノズルを装備した(図1、図2)。
-
農薬被曝低減化対策は、無人走行直進用の畦ガイドローラの装備と、畦端の薬剤散布停止や緊急停止用としてリモコン化を図り、遠隔操作で走行とポンプ停止が行える機構とした。作業者は畦間に開発機を操作導入し、走行・動噴クラッチを入れて無人走行させ、畦端でリモコンにより走行・動噴を停止する。次畦間へ機体を旋回操作後、再スタートさせ、機体から離れる。
-
薬剤散布精度は、葉表への付着指数は全てが8であり問題なく、葉裏への付着指数は、畦内部の2、3条で2〜5とやや低かったが、手散布より高い付着精度である(表1)。
-
作業者の農薬被曝は、遠隔操作で無人防除が可能になることから、皆無に近い状態で、作業者の作業環境が大幅に改善される。
-
作業能率は、2畦同時散布の作業時間が0.5h/10a、3畦同時散布の作業時間が、0.4h/10aで慣行作業に対して3.5〜5.0倍といずれも高能率である(表2)。
-
開発機の利用下限面積は、栽培期間中10回防除の時1.2ha、15回防除の時78aである。
-
[成果の活用面・留意点]
-
-
適応作式は畦幅115〜160cmで、通路幅は機体・クローラ幅を考慮して50cmとする。
-
畦ガイドローラによる畦追従性(直進性)を向上させるために、栽培ベッドは平高畦で高さ15cm以上を確保し、通路(畦間)は管理機等で平面に仕上げる。
-
フラワーネット用支柱は、通路方向に出ないよう垂直に立てる。
-
枕地は旋回のために、約1.5mを確保する。
-
薬剤散布精度を上げるため、作物の生育に合わせて、ブーム高さやノズル角度を調整する。
-
開発機は、共立(株)より約100万円で受注販売される見込みである。
-
[具体的データ]
-

図1 開発機の概要

図2 開発機による防除作業
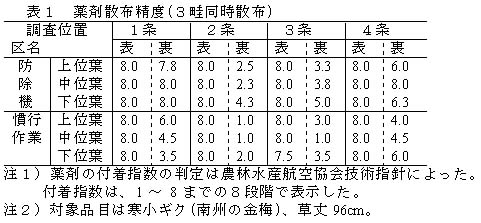
表1 薬剤散布精度(3畦同時散布)
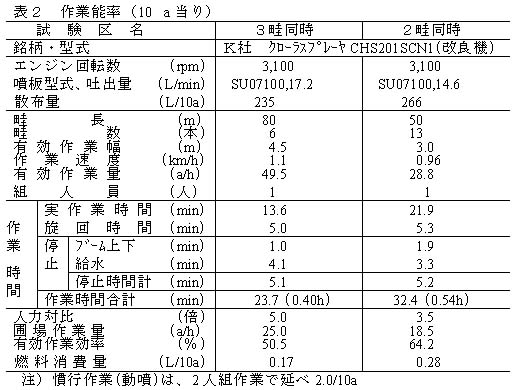
表2 作業能率(10a当り)
-
[その他]
-
研究課題名:小ギク、グラジオラスの自走式多目的管理・収穫搬出作業車の開発改良
予算区分 :県単
研究期間 :1999〜2003年度
目次へ戻る