自動化機械のための階層化システム設計と実装例
- [要約]
- 自動化機械を構築する際のシステム設計法と視覚認識の実装例である。必要なソフトウェアを階層化・モジュール化することにより、機能と実装を分離でき、ハードウェア独立なソフトウェア(アルゴリズム)の流通・再利用を効率的に行うことができる。
中国農業試験場・作物開発部・機械化研究室
[連絡先] 0849-23-4100
[部会名] 営農(情報研究)
[専 門] 機械
[対 象] 農業機械
[分 類] 研究
-
[背景・ねらい]
- 自律走行や、作物列の認識など、農作業機械の自動化研究は盛んに取り組まれているが、それら既存の成果を利用する場合、すべてを再構築する事例も数多く見受けられ、研究資源を有効に活用しているとは言い難い。そこで、このような成果の効率的な流通・再利用を視野に入れた自動化機械のシステムソフトウェア構築のあり方を提案する。
[成果の内容・特徴]
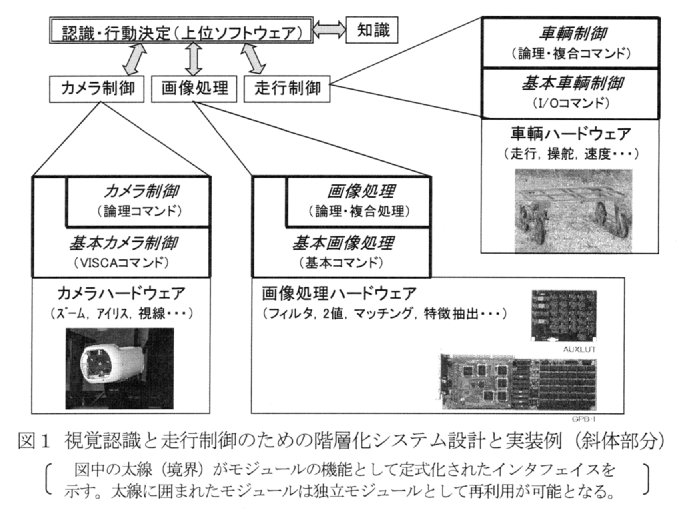
- 提案するシステム設計法は、旧来からあるソフトウェアライブラリの考え方に基づくが、オブジェクト指向の考え方を採り入れ、必要なソフトウェアを階層化・モジュール化することにより実現する点が大きな特長である(図1)。
- 視覚認識システムを題材とした設計・実装例では、必要なソフトウェアを、ハードウェアに依存した下位層(基本画像処理などのハードウェアと接したモジュール)から、より上位の問題解決のためのアルゴリズム層(認識・行動決定ソフトウェア)までの複数層に階層化している(図1)。この際、各モジュールの機能(インタフェイス)をオブジェクト指向により定式化することにより、機能とその実装を分離している(図2)。この手続きにより、機能のみの流通・再利用が可能となる。
- 階層化および機能と実装の分離により、例えばハードウェア依存部分と非依存部分の分離が可能となり、後者については、ハードウェア独立なソフトウェア(アルゴリズム実装)として流通・再利用が効率的に行えるようになる。
[成果の活用面・留意点]
- 同種研究分野において、本成果のシステム設計法を採ることにより、実装から分離された自動化機械のための制御ソフトウェアの流通促進が期待される。
- 今回の設計・実装例では、ソフトウェア開発環境への依存性は残ったままである。本実装例はWin32環境に依存するため、他環境へは仕様、機能(インタフェイス)、ソースコードでの流通・再利用となる。これらの仕様書・ドキュメント類については、現在準備中で、URL: http://ss.cgk.affrc.go.jp/~jones/img/ での公開を予定している。
[その他]
研究課題名:学習機能を備えた視覚情報認識技術の開発
予算区分 :軽労化農業
研究期間 :平成11年度(平成9~11年)
研究担当者:吉田智一、石田茂樹、亀井雅浩、土屋史紀、前岡邦彦
発表論文等:学習機能を備えた画像認識システム(第2報)、農機58講要、229-230、1999.
学習機能を備えた画像認識システム(第3報)、農機59講要、415-416、2000.
目次へ戻る
{kind=link}
{kind=link}